
Маҳсулоти нави гарм Мошини хам кардани буриши шинаи CNC 3 дар 1 барои истеҳсоли шкаф, беҳтарин фурӯши мошини хам кардани шинаи гидравликӣ барои 3 дар 1 барои шинаи CNC






Пешрафти мо аз маҳсулоти пешрафта, истеъдодҳои афсонавӣ ва қувваҳои технологии такроран тақвиятёфта барои маҳсулоти нави гарм вобаста аст, ки беҳтарин фурӯши мошини хам кардани шинаи CNC 3 дар 1 барои буриши гидравликии шинаи 3 дар 1 барои истеҳсоли шкаф мебошад. Хуш омадед ба ширкат ва корхонаи мо ташриф оред. Лутфан, агар ба шумо ягон кӯмаки иловагӣ лозим бошад, бо мо тамос гиред.
Пешрафти мо аз маҳсулоти пешрафта, истеъдодҳои афсонавӣ ва нерӯҳои технологии такроран тақвиятёфта вобаста аст.Мошини шинаи чинӣ ва мошини шинаи CNCМо ба пешниҳоди хизматрасонӣ ба мизоҷони худ ҳамчун унсури калидӣ дар таҳкими муносибатҳои дарозмуддати худ тамаркуз мекунем. Дастрасии доимии молҳои баландсифат дар якҷоягӣ бо хидматрасонии аълои пеш аз фурӯш ва пас аз фурӯш рақобатпазирии қавӣ дар бозори рӯ ба ҷаҳонишавӣ таъмин мекунад. Мо омодаем бо дӯстони тиҷорӣ аз дохил ва хориҷи кишвар ҳамкорӣ кунем ва якҷоя ояндаи хубе бунёд кунем.
Тафсилоти маҳсулот
GJCNC-BP-50 таҷҳизоти касбӣ аст, ки барои коркарди самаранок ва дақиқи шинаҳо тарҳрезӣ шудааст.
Ҳангоми коркард, ин таҷҳизот метавонад фишангҳоро ба таври худкор иваз кунад, ки ин махсусан барои шинаҳои дароз хеле самаранок аст. Бо истифода аз ин қолабҳои коркард дар китобхонаи асбобҳо, ин таҷҳизот метавонад шинаро бо сӯрохкунӣ (сӯрохиҳои мудаввар, сӯрохиҳои дарозрӯя ва ғайра), рельефканӣ, буридан, чуқур кардан, буридани кунҷҳои филедор ва ғайра коркард кунад. Қисми тайёр тавассути конвейер интиқол дода мешавад.
Ин таҷҳизот метавонад бо CNC bender мувофиқат кунад ва хати истеҳсоли коркарди шинаро ташкил диҳад.
Қаҳрамони асосӣ
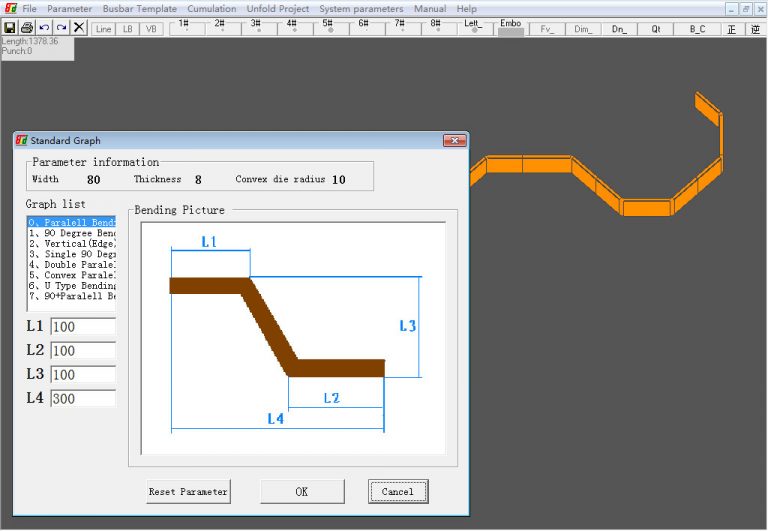
GJ3D / нармафзори барномасозӣ
GJ3D як нармафзори махсуси тарроҳии ёрирасон барои коркарди шинаҳо мебошад. Он метавонад рамзи мошиниро ба таври худкор барномарезӣ кунад, ҳар як санаи коркардро ҳисоб кунад ва ба шумо симулятсияи тамоми равандро нишон диҳад, ки тағирёбии шинаро қадам ба қадам ба таври возеҳ нишон медиҳад. Ин аломатҳо имкон доданд, ки аз рамзгузории дастӣ бо забони мошинӣ канорагирӣ кунед. Ва он метавонад тамоми равандро нишон диҳад ва аз исрофи мавод, ки аз вуруди нодуруст ба вуҷуд меояд, самаранок пешгирӣ кунад.
Солҳои зиёд ширкат дар татбиқи техникаи графикаи сеченака дар саноати коркарди шинаҳо пешсаф буд. Акнун мо метавонем ба шумо беҳтарин нармафзори идоракунии CNC ва тарроҳиро дар Осиё пешниҳод кунем.
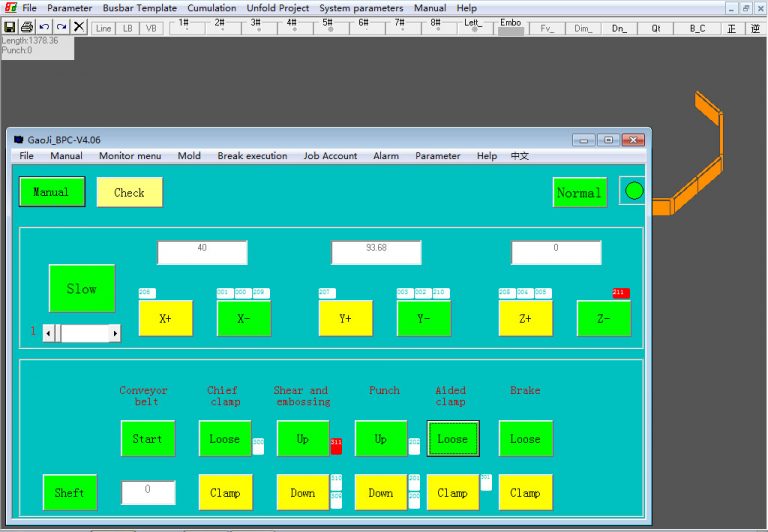
Интерфейси инсон-компютер
Барои пешниҳоди таҷрибаи беҳтари корӣ ва маълумоти муфидтар. Таҷҳизот дорои интерфейси инсон-компютер бо андозаи 15 дюймаи RMTP мебошад. Бо ин дастгоҳ шумо метавонед маълумоти равшан дар бораи тамоми раванди истеҳсолот дошта бошед, дар сурате ки ягон сигнали хатар рух дода метавонад ва таҷҳизотро бо як даст идора кунед.
Агар ба шумо лозим ояд, ки маълумоти танзимоти таҷҳизот ё параметрҳои асосии қолабро тағир диҳед. Шумо инчунин метавонед санаро бо ин дастгоҳ ворид кунед.
Сохторҳои механикӣ
Барои эҷоди сохтори механикии устувор, самаранок, дақиқ ва дарозмуддат, мо винти кураии дақиқи баланд, роҳнамои хаттии дақиқ аз ҷониби Тайван HIWIN ва системаи сервои YASKAWA-ро интихоб мекунем, инчунин системаи беназири ду фишанги худро. Ҳамаи инҳо системаи интиқолро ба андозаи зарурӣ эҷод мекунанд.


Мо барномаи ивазкунии худкорро таҳия мекунем, то системаи фишангро, махсусан барои коркарди шинаҳои дароз, самараноктар гардонем ва инчунин метавонем кори операторро ба ҳадди аксар кам кунем. Барои муштарии худ арзиши бештар эҷод кунем.
Ду намуд вуҷуд дорад:
GJCNC-BP-50-8-2.0/SC (Шаш сӯрохкунӣ, буриш, пахшкунӣ)
GJCNC-BP-50-8-2.0/C (Ҳашт снаряд, буриш)
Шумо метавонед моделҳои лозимиро интихоб кунед
Бастабандии содиротӣ


Пешрафти мо аз маҳсулоти пешрафта, истеъдодҳои афсонавӣ ва қувваҳои технологии такроран тақвиятёфта барои маҳсулоти нави гарм вобаста аст, ки беҳтарин фурӯши мошини хам кардани шинаи CNC 3 дар 1 барои буриши гидравликии шинаи 3 дар 1 барои истеҳсоли шкаф мебошад. Хуш омадед ба ширкат ва корхонаи мо ташриф оред. Лутфан, агар ба шумо ягон кӯмаки иловагӣ лозим бошад, бо мо тамос гиред.
Маҳсулоти нави гармМошини шинаи чинӣ ва мошини шинаи CNCМо ба пешниҳоди хизматрасонӣ ба мизоҷони худ ҳамчун унсури калидӣ дар таҳкими муносибатҳои дарозмуддати худ тамаркуз мекунем. Дастрасии доимии молҳои баландсифат дар якҷоягӣ бо хидматрасонии аълои пеш аз фурӯш ва пас аз фурӯш рақобатпазирии қавӣ дар бозори рӯ ба ҷаҳонишавӣ таъмин мекунад. Мо омодаем бо дӯстони тиҷорӣ аз дохил ва хориҷи кишвар ҳамкорӣ кунем ва якҷоя ояндаи хубе бунёд кунем.
Параметрҳои асосии техникӣ
| Андоза (мм) | 7500*2980*1900 | Вазн (кг) | 7600 | Сертификатсия | CE ISO | ||
| Қувваи асосӣ (кВт) | 15.3 | Шиддати вуруд | 380/220В | Манбаи барқ | Гидравликӣ | ||
| Қувваи баромад (кн) | 500 | Суръати сӯрохкунӣ (асп/дақ) | 120 | Меҳвари идоракунӣ | 3 | ||
| Андозаи максималии мавод (мм) | 6000*200*15 | Макс Мушкинг Маргҳо | 32 мм (Ғафсии мавод камтар аз 12 мм) | ||||
| Суръати макон(Меҳвари X) | 48м/дақ | Зарбаи силиндраи сӯрохкунанда | 45 мм | Такрорпазирии ҷойгиркунӣ | ±0.20мм/м | ||
| Зарбаи максималӣ(мм) | Меҳвари XМеҳвари YМеҳвари Z | Соли 2000530350 | МаблағofМаргҳо | МуштзанӣБуридани мӯйНаққошӣ | 6/81/11/0 | ||
Конфигуратсия
| Қисмҳои идоракунӣ | Қисмҳои интиқол | ||
| ҶДММ | ОМРОН | Роҳнамои хаттии дақиқ | Тайван ҲИВИН |
| Сенсорҳо | Шнайдери барқӣ | Винти курашакли дақиқ (серияи 4) | Тайван ҲИВИН |
| Тугмаи идоракунӣ | ОМРОН | Сохти пуштибонии винти курашакл | NSK-и Ҷопонӣ |
| Шишаи ламсӣ | ОМРОН | Қисмҳои гидравликӣ | |
| Компютер | Леново | Клапани электромагнитии фишори баланд | Италия |
| Контактори AC | ABB | Найчаҳои фишори баланд | Италия MANULI |
| Қатъкунандаи занҷир | ABB | Насоси фишори баланд | Италия |
| Мотори серво | ЯСКАВА | Нармафзори идоракунӣ ва нармафзори дастгирии 3D | GJ3D (нармафзори дастгирии сеченака, ки аз ҷониби ширкати мо тарҳрезӣ шудааст) |
| Драйвери серво | ЯСКАВА | ||
Категорияҳои маҳсулот
-

Таъминкунандагони беҳтарини Чин касбии CNC шинаи шасси ...
-
Таъминкунандагони беҳтарини Чин шинаи нави интеллектуалии 3D P ...
-

Коркарди камфери шинаи шинаи самараноки касбӣ ...
-

Фабрикаи арзони гарми Чин CNC бисёрфунксионалии мис ...
-
Корхонаи ODM Чин CNC бисёрфунксионалии коркарди шинаи ...
-

Фурӯши гарми корхонаи истеҳсоли Чин CNC Fast Copper Alu ...



